伺服与运动控制系统设计 - (EPUB全文下载)
文件大小:9.48 mb。
文件格式:epub 格式。
书籍内容:
图书在版编目(CIP)数据
伺服与运动控制系统设计/田宇编著.—北京:人民邮电出版社,2010.5
ISBN 978-7-115-22363-0
Ⅰ.①伺… Ⅱ.①田… Ⅲ.①伺服系统—系统设计 Ⅳ.①TP275
中国版本图书馆CIP数据核字(2010)第024552号
内容提要
本书围绕运动与伺服控制技术,首先介绍了运动系统的基本概念;然后分章对运动系统的各个组成部分,包括伺服电机、伺服驱动编码器、伺服驱动器和运动控制器等,进行了详细的介绍,同时还介绍了伺服系统优化方面的内容;最后举例说明了伺服控制的应用,以加深读者对运动与伺服系统的认识。
本书是自动化控制领域广大技术人员的实用自学手册,也可供高等院校自动化、机电一体化专业的师生参考,同时也是一本非常实用的职业技术培训教材。
伺服与运动控制系统设计
◆编 著 田宇
责任编辑 韦毅
◆人民邮电出版社出版发行 北京市崇文区夕照寺街14号
邮编 100061 电子函件 315@ptpress.com.cn
网址 http://www.ptpress.com.cn
北京铭成印刷有限公司印刷
◆开本:787×1092 1/16
印张:9.25
字数:220千字 2010年5月第1版
印数:1-4 000册 2010年5月北京第1次印刷
ISBN 978-7-115-22363-0
定价:29.00元
读者服务热线:(010)67129264 印装质量热线:(010)67129223
反盗版热线:(010)67171154
前言
目前,运动控制系统在机械工业自动化中的运用日益增多。但国内市场上大部分品质优良的运动控制系统(包括伺服控制技术)都依赖于进口,并且对于控制系统的应用仅限于使用经验,而使用经验的积累也大都是点滴记录,少有完整的系统论述的书籍,同时又缺乏理论依据。本书立足于伺服电机、驱动器、控制器的原理特性,对于伺服系统日常问题及各种常用功能进行解释,注重理论与经验相结合。针对系统设计者,本书讲述了如何选购各种组件,如何构建一个优良的系统;针对使用者,对系统运行中的各种现象给予了合理的解释;针对设备研发者,则向其推荐各种先进功能及其实现方法。因此,无论是系统设计者、使用者、学生还是研发人员,都能通过本书学习到伺服与运动控制的相关知识。
西门子运动控制器因其性能在控制行业处于优势地位,本书以西门子运动控制系统作为主线,但并不局限于该公司的产品,每章内容都是从伺服系统的共性出发展开,然后以西门子产品为例进行总结。因此,无论是西门子产品的使用者还是其他产品的使用者,都能通过本书得到借鉴。
本书作者希望通过深厚的控制理论基础与多年积累的应用经验,用简单易懂的语言向读者展示控制的魅力和伺服的魅力。全书共分为7章,第1章首先从概念上介绍什么是运动控制系统,什么是伺服控制,接着介绍伺服系统的构成以及各个构成部分对系统性能的影响,然后讨论运动控制系统的发展趋势。第2章至第6章分别对运动控制系统的构成(包括伺服电机、编码器、驱动器、运动控制器)进行详细介绍,同时也介绍了伺服系统优化方面的内容。第7章针对西门子运动控制系统在不同行业的应用举例进行说明,以加深读者对伺服应用的理解。
由于作者水平有限,加之时间仓促,书中错误和疏漏之处在所难免,恳请广大读者不吝指正。对本书有任何意见或建议,请发送至本书责任编辑的信箱weiyi@ptpress.com.cn,衷心感谢!
作者
目录
题名页
版权页
前言
目录
第1章 运动系统的基本概念
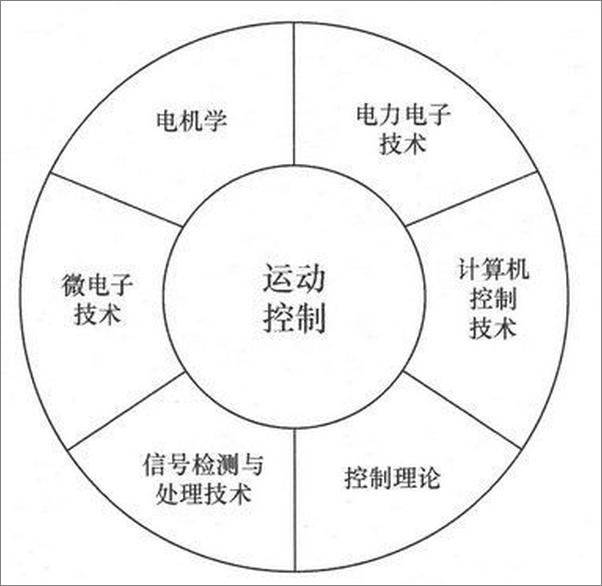
1.1 运动控制的定义
1.2 伺服系统的定义
1.3 伺服系统的组成
1.4 伺服系统的性能要求
1.5 影响伺服系统性能的因素
1.6 交流永磁同步电机伺服系统
1.7 交流伺服的行业应用
1.8 伺服技术的发展过程及趋势
第2章 伺服电机
2.1 伺服电机的介绍
2.2 伺服电机的特点
2.3 伺服电机的分类
2.3.1 同步电机与异步电机
2.3.2 永磁同步电机与无刷直流电机
2.4 电机数据
2.5 西门子伺服电机
2.5.1 1FK、1FT同步伺服电机
2.5.2 1FW系列扭矩电机
2.5.3 1FN系列直线电机
2.5.4 1PH7、1PL6系列异步电机
2.6 伺服电机的选择
2.7 带Drive-CliQ接口的伺服电机
2.8 电机的谐振频率
2.9 选择电机的基本原则
2.10 电机容量的计算步骤
2.11 永磁同步电机的研究现状
2.12 永磁同步电机的控制
第3章 伺服驱动编码器
3.1 编码器介绍
3.2 伺服编码器的特点与连接
3.2.1 EnDat
3.2.2 SSI
3.2.3 正/余弦编码器
3.2.4 编码器的相位调整
3.2.5 编码器的倍频
3.2.6 编码器的特征参数
3.2.7 驱动器与编码器的连接
第4章 伺服驱动器
4.1 交流变频技术的发展
4.2 基于矢量控制的伺服控制
4.3 伺服系统的控制模型
4.4 西门子伺服驱动器介绍
4.5 西门子伺服驱动器Sinamics S120
4.6 伺服控制方式
4.7 驱动器的过载能力
4.8 Sinamics S120的调试软件
4.9 S120的基本定位功能
4.10 Trace功能介绍
4.11 数字滤波器
4.12 自动优化功能
4.13 功能函数发生器
4.14 Measuring功能介绍
4.15 驱动器的通信功能
第5章 伺服系统的优化
5.1 控制器模型
5.2 系统模型
5.3 伯德图
5.4 控制器优化的关键
5.5 电流环、速度环、位置环的优化
第6章 运动控制器
6.1 西门子运动控制器Simotion
6.2 工艺对象
6.2.1 轴
6.2.2 虚轴
6.3 运动控制功能
6.3.1 定位
6.3.2 回零
6.3.3 点动
6.3.4 齿轮同步
6.3.5 圆周测试
6.3.6 凸轮
6.3.7 路径插补功能
6.3.8 凸轮输出
6.3.9 快速测量输入
6.3.10 位置控制器
6.3.11 压力 ............
书籍插图:
以上为书籍内容预览,如需阅读全文内容请下载EPUB源文件,祝您阅读愉快。
书云 Open E-Library » 伺服与运动控制系统设计 - (EPUB全文下载)